Các thành phần cơ bản của một hệ thống cơ khí kết hợp với Vision
Đối với một hệ thống Vision cơ bản không thể thiếu máy ảnh(Camera), thấu kính(Lens) và phần chiếu sáng(Lighting). Hơn nữa để Vision hoạt động chính xác, hiệu quả và ứng dụng linh hoạt trong sản xuất công nghiệp thì cần kết hợp với các hệ thống cơ khí. Dân gian có câu "Dao sắc không bằng chắc kê" để nói lên tầm quan trọng của hệ thống cơ khí.
Một số ứng dụng của hệ thống cơ khí khi kết hợp với Vision như là:
Truyền tải, điều khiển: di chuyển các thành phần cấu trúc, cơ chế điều khiển hệ thống
Cơ chế điều khiển phôi: hệ thống xử lý phôi, cấp/xả phôi
Kiểm tra, đo lường: hệ thống định vị/kẹp, lắp ráp/xử lý, tập hợp/phân loại
Một số thành phần cơ khí thường kết hợp với Vision như hệ thống băng tải, xi lanh khí nén, cảm biến, đầu dò,...Để hiểu rõ hơn các thành phần này sẽ được lựa chọn và thiết kế như nào, chúng ta cùng xem qua một số hệ thống cơ khí kết hợp Vision được ứng dụng phổ biến dưới đây.
1. Hệ thống điều chỉnh vị trí phôi
Ứng dụng: Di chuyển, điều khiển vị trí phôi, hệ thống cấp phôi, kiểm tra hay đo đạc
Mục đích: Thực hiện kiểm tra trực quan các thành phần cơ khí
Phôi sử dụng: Bánh răng nhựa đường kính 34mm, chiều cao 29mm
Mô hình hệ thống điều chỉnh vị trí phôi
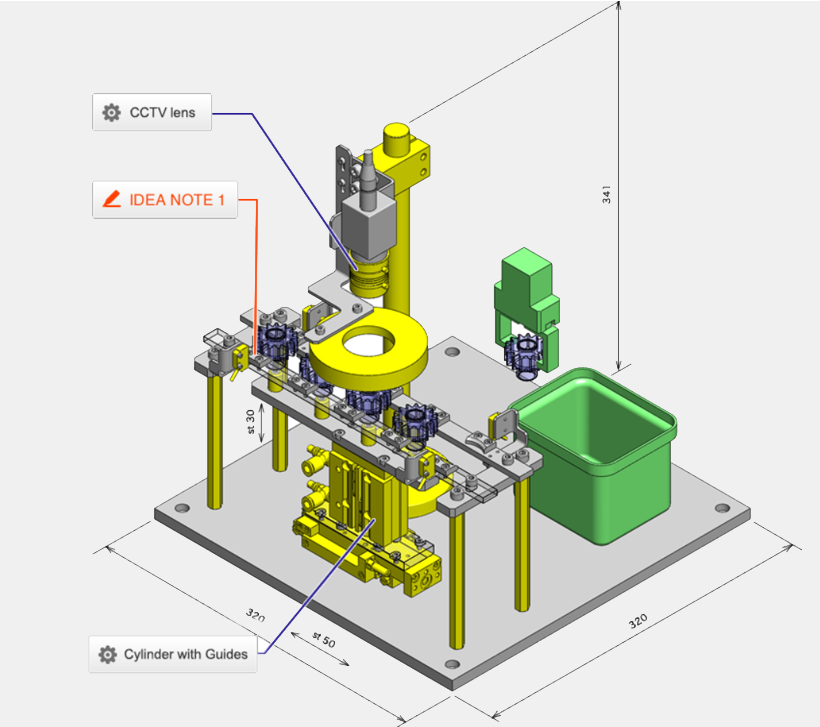
Hệ thống sử dụng phương pháp định vị phôi: Phôi gia công trên bàn làm việc được định vị từ hai hướng cho bộ kẹp để tránh ảnh hưởng đến thanh dẫn gia công. Điều này cho phép các móng kẹp để kẹp phôi gần trọng tâm
Lưu ý lựa chọn các thành phần cơ khí:
Chọn một ống kính máy ảnh từ các yêu cầu về độ phân giải kiểm tra: CCTV Lens - Thấu kính được gắn vào máy ảnh để kiểm tra sản phẩm, dựa vào sự thay đổi của máy ảnh, lỗi, yêu cầu kiểm tra và việc thử nghiệm để lựa chọn được thấu kính phù hợp.
Chọn ống xi lanh DIA từ điều kiện tải, xi lanh có thanh dẫn và bàn trượt không khí được sử dụng để di chuyển các thành phần dưới thanh dẫn. thích hợp làm nguồn chuyển động nâng phôi, lưu ý về tốc độ
Nếu thành phần không ổn định ở vị trí nâng, hãy thêm cảm biến nhận dạng vị trí thành phần, để cho phép vận chuyển an toàn hơn
Khi thiết kế cần đặc biệt quan tâm đến kích thước, khoảng cách chi tiết và tốc độ hoạt động của hệ thống và đưa ra con số cụ thể. Đối với thiết kế này có thiết kế nhỏ gọn hơn thiết kế xi lanh dẫn hướng thông thường 50%.
.JPG)
Một số thành phần cơ khí được sử dụng
Thông số kỹ thuật thiết kế:
- Chiều cao tổng thể: 341 mm
- Kích thước ngoài: 320 x 320 x 341 mm
- Hành trình lên / xuống: 30 mm
- Hành trình nạp: 50 mm
- Độ chính xác vị trí nguồn cấp dữ liệu thành phần: ± 0,5
2. Hệ thống kiểm tra, phân loại sản phẩm đạt/ không đạt tiêu chuẩn
Ứng dụng: Cấp phôi, kiểm tra, phân loại và đo đạc
Mục đích: Cấp phôi qua băng chuyền, kiểm tra và phân loại sản phẩm lỗi
Phôi: sản phầm hình đĩa, đường kính 13mm, chiều cao 3mm, khối lượng 3.1g
Thành phần chính: băng tải, camera, xi-lanh khí nén
Hoạt động: Phôi được cấp bởi người vận hành qua máng rồi di chuyển xuống băng chuyền kiểm tra, các sản phẩm lỗi sẽ được thổi khỏi băng chuyền qua hệ thống xi lanh khí nén.
.png)
Mô hình hệ thống kiểm tra, phân loại
Phôi được đưa từng con một xuống băng tải bằng con lăn. Các thành phần có thể được nạp một cách đồng đều qua vết cắt bằng con lăn để giúp phân loại các thành phần.
Nguyên lý hoạt động của hệ thống:
Sản phẩm được cấp bởi băng tải qua sensor phát hiện vật. Sensor phát hiện vật thường có thể đặt sát vị trí của camera. Trong trường hợp có bộ định thời gian thì vị trí của camera có thể tùy chỉnh. Nếu trong trường hợp sử dụng Hard-trigger của camera, có thể điều chỉnh độ trễ của xung trigger camera trong cấu hình cài đặt camera. Phần mềm sẽ thu nhận hình ảnh tiến hành phân tích hình ảnh sẽ cho đầu ra tương ứng với chất lượng của vật. Nếu NG, xilanh thổi vật sẽ được kích hoạt để đẩy vật vào khay NG. Vật OK sẽ chuyển động tiếp đến khay OK.
Lưu ý lựa chọn các thành phần:
Máy ảnh và đèn LED chiếu sáng có thể được điều chỉnh độc lập bằng một trục duy nhất, chọn ánh sáng phù hợp cho camera kiểm tra để phát hiện các khuyết tật cơ bản trên sản phẩm. Tốc độ của LED cần tính toán phù hợp với tốc độ của băng tải.
Sử dụng con lăn có urethane để không làm hỏng phôi, lưu ý về tốc độ
Các thanh dẫn và con lăn được cung cấp cho máng sạc để cấp phôi khi chúng được thêm theo chiều ngang.
Xác định góc để cấp phôi tại đó từng phôi có thể được nạp vào băng tải theo từng lần thử và sai.
Kiểm tra sự phát thải của phôi bị lỗi bằng cách thổi khí hoạt động bình thường như dự định bằng cách điều chỉnh vòi phun và áp suất không khí, thông qua dấu vết và lỗi

Một số thành phần cơ khí sử dụng
Thông số kỹ thuật thiết kế:
Băng chuyền: công suất truyền tải thấp (6W), chiều dài băng tải: 500mm, tốc độ băng tải: 18,8m / phút
Cảm biến tiệm cận: có thể phát hiện phôi ở khoảng cách tương đối xa. Khoảng cách phát hiện: 14mm ± 10%, cài đặt khoảng cách: 0 - 11,2mm,ở đây khoảng cách giữa cảm biến tiệm cận và phôi được đặt thành 6,1mm
Kích thước ngoài: W650 x D250 x H437 mm
3. Hệ thống kiểm tra các đặc tính điện sử dụng đầu dò tiếp xúc
Ứng dụng: Truyền tải, di chuyển, kiểm tra và đo đạc
Mục đích: Vật cố định để kiểm tra các đặc tính điện sử dụng đầu dò tiếp xúc
Phôi sử dụng: Bảng PC nhỏ W22xD26xt1mm
Hoạt động: Phôi được đặt lên bàn cố định bằng robot, và sau đó trượt vào vị trí bên dưới đầu dò để kiểm tra
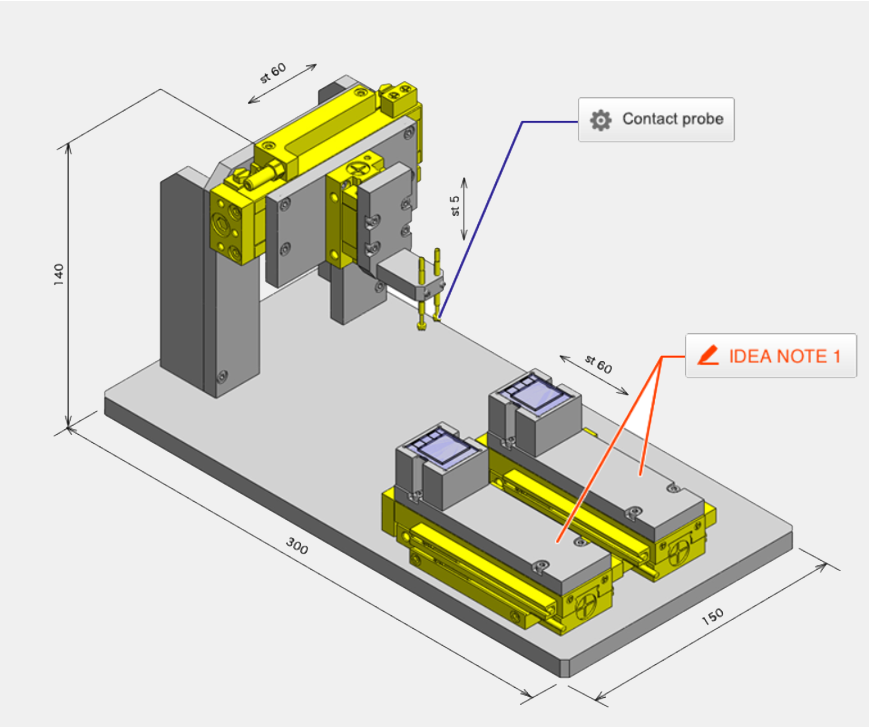
Mô hình hệ thống kiểm tra các đặc tính điện sử dụng đầu dò tiếp xúc
Hai bảng tải sẽ cân bằng thời gian thao tác. Kiểm tra đặc tính điện mất nhiều thời gian hơn so với tải và định vị phôi. Hai bảng quy trình nơi phôi có thể được tải xen kẽ, với bảng thăm dò di chuyển, cân bằng thời gian chu kỳ.
Lưu ý lựa chọn các thành phần cơ khí:
Dẫn hướng tuyến tính bằng khí nén. So với xi lanh điển hình có thanh dẫn, thanh dẫn hướng khí nén có thiết kế nhỏ gọn hơn (tiết diện nhỏ hơn hai lần). Khi sử dụng thanh dẫn hướng tuyến tính bằng khí nén, hãy đặt bên yêu cầu độ chính xác cao hơn làm bên dừng.
Chọn đầu dò tiếp xúc phù hợp với vật liệu của phôi được kiểm tra.
Đầu dò tiếp xúc: Để kiểm tra độ dẫn điện của phôi. Hình dạng đầu tiếp xúc phụ thuộc vào đối tượng thử nghiệm. Nhược điểm có thể đứt dây, biến dạng.

Một số bộ phận cơ khí sử dụng
Thông số kĩ thuật thiết kế:
Kích thước ngoài: W150 x D300 x H140mm
Định vị chính xác: ± 0,3mm
4. Hệ thống Nhận và Đặt (Đầu cốc hút)
Ứng dụng: Truyền tải và di chuyển
Mục đích: Chọn và đặt di chuyển với giá đỡ hút
Phôi sử dụng: Đĩa nhựa đường kính 84mm, chiều cao 13mm, khối lượng 20g
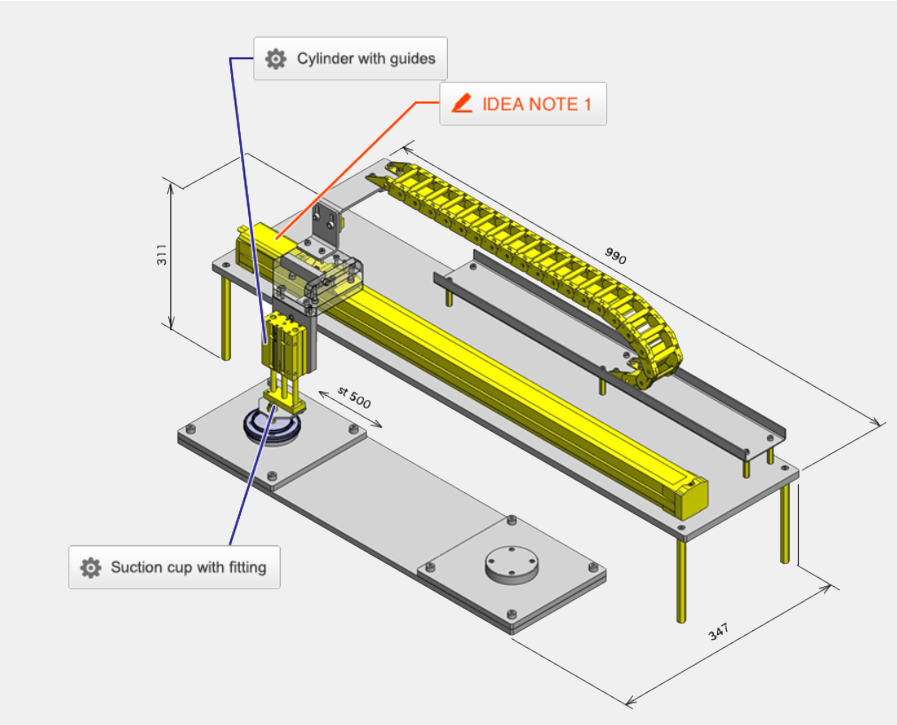
Mô hình hệ thống nhận đặt và kiểm tra
Giảm các bước thiết kế với sự kết hợp của các thành phần có sẵn trên thị trường Nhằm mục đích giảm bớt các bước thiết kế bằng cách cấu trúc cơ chế chính với sự kết hợp của các thành phần có sẵn trên thị trường
Lưu ý khi lựa chọn các thành phần:
Chọn giá đỡ hút phù hợp để hút giữ phôi và robot thỏa mãn các thông số kỹ thuật chuyển (Tải trọng, tốc độ, hành trình). Với hành trình dài hơn, hãy sử dụng một giá đỡ cáp để tránh việc dây nịt bị rối hoặc bị hỏng. Do cốc hút bị xuống cấp, bao gồm công tắc áp suất để giám sát tiếp xúc, cũng thực hiện bảo dưỡng định kỳ để tránh mất sức hút.
Cốc hút có khớp nối: Thích hợp để kẹp bề mặt phẳng của phôi, nhược điểm có thể mất khả năng hút do mòn và xuống cấp
Xi lanh có thanh dẫn: Để dễ thiết kế, điều này đã được lựa chọn vì nó là một bộ phận lắp ráp hoàn chỉnh mà không cần thiết kế thêm
Robot một trục được sử dụng vì cần nhiều vị trí trong một hành trình duy nhất.
