Những yếu tố quan trọng khi lựa chọn thành phần cho hệ thống thị giác máy
Ngày: 18/11/2020
Việc lựa chọn camera cho một hệ thống thị giác máy không đơn giản chỉ là chọn một chiếc máy ảnh mà còn cần lưu ý đến rất nhiều yếu tố xung quanh để có thể tạo ra những hình ảnh chất lượng và tối ưu hóa để dễ dàng cho việc lập trình. Ba vấn đề quan tâm đầu tiên chính là:
1. Lựa chọn loại cảm biến và độ phân giải dựa trên nhu cầu ứng dụng
2. Làm thế nào để chọn camera và ống kính quang học tốt nhất để đáp ứng các yêu cầu
3. Kết hợp ánh sáng phù hợp để làm nổi bật các tính năng để có độ tin cậy kiểm tra cao hơn
.JPG)
Một số ứng dụng rộng rãi của thị giác máy: Đọc mã code, kiểm tra màu, kiểm tra bề mặt sản phẩm, kiểm tra lắp ráp sản phẩm, dẫn hướng robot và đo kích thước
Chất lượng hình ảnh thực sự là yếu tố then chốt trong quá trình hoạt động của máy, nó phản ánh hiệu quả thực sự của hệ thống kiểm tra vì vậy cần lấy được hình ảnh có chất lượng tốt nhất có thể. Cần lựa chọn cảm biến CMOS hay CCD khi biết loại thấu kính (lens), khoảng cách làm việc của thấu kính khi lấy nét (WD: Working distance) và tạo ra ánh sáng đồng nhất để làm nổi bật các đối tượng muốn kiểm tra, làm giảm bất cứ những thứ gì ở trong nền mà bạn không quan tâm. Thị giác máy được ứng dụng phổ biến trong: đọc mã code 2D, đo lường, đo khoảng cách góc, phát hiện khuyết tật, xác định tọa độ, tìm kiếm màu, xác minh lắp ráp,…
.JPG)
Một số camera và cảm biến (CMOS, CCD)
Lựa chọn cảm biến của camera phụ thuộc vào ứng dụng mà bạn đang tìm kiếm (liên quan đến đặc tính của đối tượng kiểm tra), độ chính xác yêu cầu (hay kích thước nhỏ nhất của lỗi trên vật), tốc độ thu nhận như thế nào, môi trường thực tế, sử dụng camera màu hay đơn sắc, camera vùng hay camera quét dòng. Xác định chính xác yêu cầu bạn đang muốn tìm kiếm khuyết tật, đo khoảng cách, đọc mã vạch hay đọc OCR,...cũng là vấn đề quan trọng để lựa chọn camera cho ứng dụng của mình.
Để đạt được độ chính xác mong muốn, trước tiên cần xác định FOV phù hợp nhất. FOV ( Field of View) là trường nhìn, cho biết ta có thể thu vào bao nhiêu phần hình ảnh qua chiếc máy ảnh và ống kính mà ta đang sử dụng. FOV thay đổi khi độ dài tiêu cự ống kính và kích thước cảm biến (hoặc kích thước film) thay đổi. Sau đó xác định khoảng làm việc tối ưu, độ chính xác cần đạt được, cần sử dụng bao nhiêu camera và hệ thống có thể đạt kết quả tốt hơn thiết kế không.
#1 Ứng dụng kiểm tra lỗi: Kích thước phần khuyết tật so với đối tượng kiểm tra phải chiếm ít nhất từ 3-4 pixels trên ảnh thu nhận
Ví dụ: FOV = 12”, kích cỡ đối tượng nhỏ nhất = 0.25”
(FOV/defect size)x(min# of pixels)
12/0.25x3=144 pixels (camera 640)
#2 Ứng dụng đo lường và Pick-n-Place
Ví dụ: FOV = 2”, độ chính xác = 0.01”
(FOV/sensor size) = inches/pixel
2/640 = 0.0031 inches
2/1280 = 0.001 inches
.JPG)
Tăng độ chính xác của bạn bằng cách giảm FOV với hai camera
Sử dụng camera màu hay camera đơn sắc, câu hỏi đặt ra là bạn có thực sự cần camera màu không, bạn đang cần tìm kiếm sự hiện diện của một màu hay ứng dụng này có thể thực hiện với camera đơn sắc không? Vì trên thực tế rất nhiều ứng dụng không nhất thiết phải sử dụng camera màu, thậm chí khi sử dụng camera đơn sắc lại cho ra kết quả rõ ràng hơn. Đặc biệt lưu ý, nếu sử dụng camera màu bạn phải sử dụng ánh sáng trắng và phải cân bằng trắng khi chụp.
.JPG)
Thông thường đa phần các ứng dụng trong thực tế đều chuyển động hoặc có yêu cầu tốc độ để đảm bảo hiệu suất công việc. Vì vậy tốc độ cũng ảnh hưởng một phần không nhỏ đến hệ thống. Tổng thời gian kiểm tra bằng thời gian camera thu nhận hình ảnh và xử lý chúng.
Ví dụ: 30 fps = 1800 ppm
297 fps = 17 820 ppm
Màn trập điện tử: cần đủ ánh sáng – micro giây
Strobe: 300 + PPM
Môi trường làm việc ở khu vực thực phẩm, ẩm ướt nhiều dầu, nhiệt độ cao/ thấp hay rung động cũng rất đáng lưu ý khi lựa chọn thiết bị sử dụng. Ví dụ như trong môi trường thực phẩm, để đảm bảo tiêu chuẩn về an toàn và độ sạch ,nếu ở khu vực ẩm ướt, người ta sẽ rửa tất cả các thiết bị bằng hỗn hợp clo, axit hoặc các hóa chất khác nhau sẽ ăn mòn nhôm thép, vì vậy bạn sẽ cần những thứ như thép không gỉ trong vỏ bọc nhựa hoặc cao su, sử dụng camera tiêu chuẩn IP67. hay trong môi trường có bụi bặm, một trong những điều cần thiết là bảo vệ máy ảnh và ống kính khỏi bị bám nhiều bụi bẩn, vật liệu bắn vào làm cho cất lượng hình ảnh suy giảm. Ở môi trường nhiệt độ cao, làm mát cho máy ảnh, không để tạo sự ngưng tụ bên trong nơi đặt máy ảnh làm mờ máy ảnh.Hầu hết các sản phẩm sẽ chuyển động, nên gắn cố định máy ảnh vào một loại giá đỡ, tránh những va đập lớn, có thể kết hợp với cấu trúc bê tông để chống rung.
.JPG)
Mộ số khách hàng đang tìm kiếm có thể là một vết rách trên mép hoặc một số khuyết tật xảy ra, hoặc một lỗ hổng,…để dễ dàng phát hiện họ sử dụng nhiều camera vùng. Tuy nhiên trong trường hợp khách hàng muốn tìm nhứng khuyết tật rất nhỏ, đặc biệt là trên phim mà bạn nhìn thấy các lỗ micromet hoặc vết bẩn, trong trường hợp này camera quét dòng sẽ thực hiện tốt hơn.
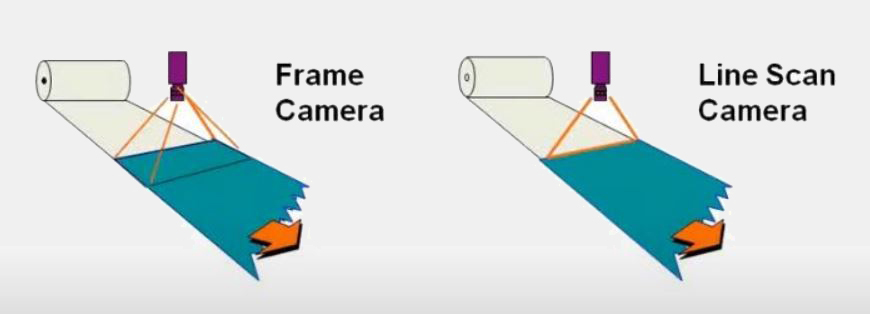
Chọn camera quét dòng
-
Máy ảnh quét dòng được chọn theo kích thước cảm biến và tốc độ dòng
-
Xác định kích thước cảm biến ( kích thước khuyết tật trên đối tượng kiểm tra chiếm ít nhất 3-4 pixels)
Ví dụ: FOV = 12”, kích cỡ khuyết tật = 0.005”
(FOV/defect size)x(min# of pixels)
12/0.005 x 3 = 7200 pixels (camera 8K hoặc hai camera 4K)
-
Để xác định tốc độ dòng máy ảnh cần, kích thước pixel hình ảnh và tốc độ một phần là cần thiết
Ví dụ: FOV = 12”, speed 20”/second, 8k camera
Image Pixel size = FOV/ sensor size
12/8192 = 0.001465”
Minimum line speed needed: 20/0.001465 = 13,654
Use a Piranha2 8khz camera ( or 2 Spyder3 4k 18khz cameras)
Một số yêu cầu khi đọc mã vạch 1D, 2D hoặc đọc chữ OCR
-
Để đọc mã vạch 1D, sử dụng FOV với ít nhất 3+ pixel mỗi thanh
-
Để đọc mã vạch 2D, sủ dụng FOV với ít nhất 4x4 pixel mỗi ô
-
Để đọc chữ OCR, sử dụng FOV cung cấp ít nhất cho bạn 20x20 pixel trên đối tượng
.JPG)
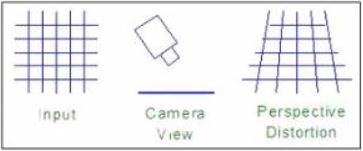
Độ biến dạng của ống kính và độ phân giải
- Chúng tôi khuyên bạn nên sử dụng các ống kính chất lượng tốt “thị giác máy”, “megapixel” hoặc ống kính chuyên dụng : độ phân giải ống kính có thể là một yếu tố hạn chế
- Phải bù biến dạng thấu kính khi đo bằng hệ thống thị giác: thường nhiều barrel hơn ở tiêu cự ngắn hơn
Theo quan điểm cá nhân thì:
- Các phần có độ sâu có thể có “biến dạng” 1/Z và các vấn đề về độ sâu trường ảnh: làm phức tạp các phép đo, thị giác máy dễ dàng hơn nhiều trên các phần phẳng hoặc gần bằng phẳng
- Thị giác máy có thể đo chiều sâu: tam giác, moire, giao thoa,.., khá khó hoặc không thể để xem các lỗ hổng
- Cố gắng đặt máy ảnh vuông góc với một phần
Lens Vignetting
- Độ dày hiệu quả của mống mắt làm giảm ánh sáng ở các cạnh tỷ lệ với cos^4(i)
- Cảm biến thường chỉ sử dụng trung tâm của ống kính
- Tệ hơn ở độ dài tiêu cự ngắn – bộ lọc sửa điểm
.JPG)
Telecentric Lenses
- Độ biến dạng và họa tiết quang học thấp
- Được khuyến nghị cho các biện pháp đo lường chính xác
- Rất ít biến dạng phối cảnh
- FOV là đường kính ống kính
- Vẫn có giới hạn độ sâu trường ảnh
- Giá ống kính thị giác máy gấp 4 đến 15 lần
Có thể nói ánh sáng cũng là một trong những yếu tố quan trọng ảnh hưởng tới chất lượng của hình ảnh. Hình dưới đây là ví dụ khi chụp một đối tượng nhưng sử dụng các loại ánh sáng khác nhau.
.JPG)
Một số điểm lưu ý khi thiết lập hệ chiếu sáng cho hệ thống thị giác:
- Duy trì ánh sáng liên tục, không thay đổi theo thời gian
- Duy trì ánh sáng nhất quán, chiếu sáng mà không tạo điểm sáng hoặc bóng
- Ngăn chặn sự thay đổi ánh sáng của môi trường
- Tối ưu hóa độ tương phản
- Tách biệt các tính năng hoặc yếu tố quan trọng khỏi nền
- Lựa chọn nguồn sáng thích hợp cho loại kiểm tra mà bạn muốn thực hiện
Các kĩ thuật chiếu sáng:
- Backlight (Transmitted) – Đối diện với camera
- Incident (Reflected) – Cùng một mặt với camera
General Purpose – Ring or Area
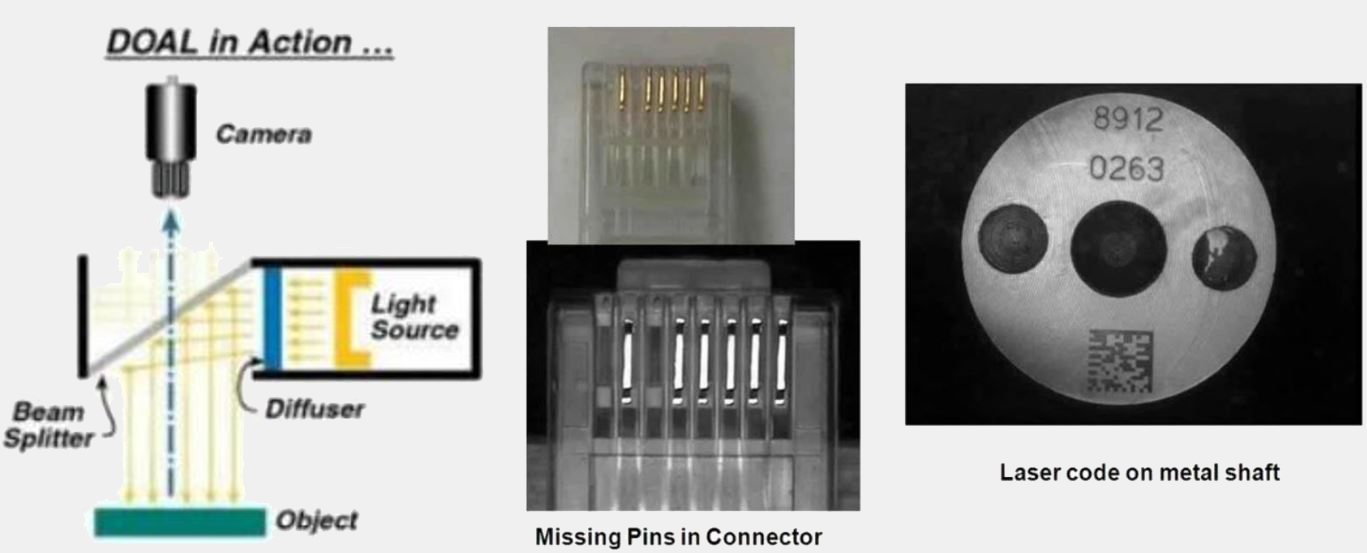
DOAL – Diffused On-Axis Light
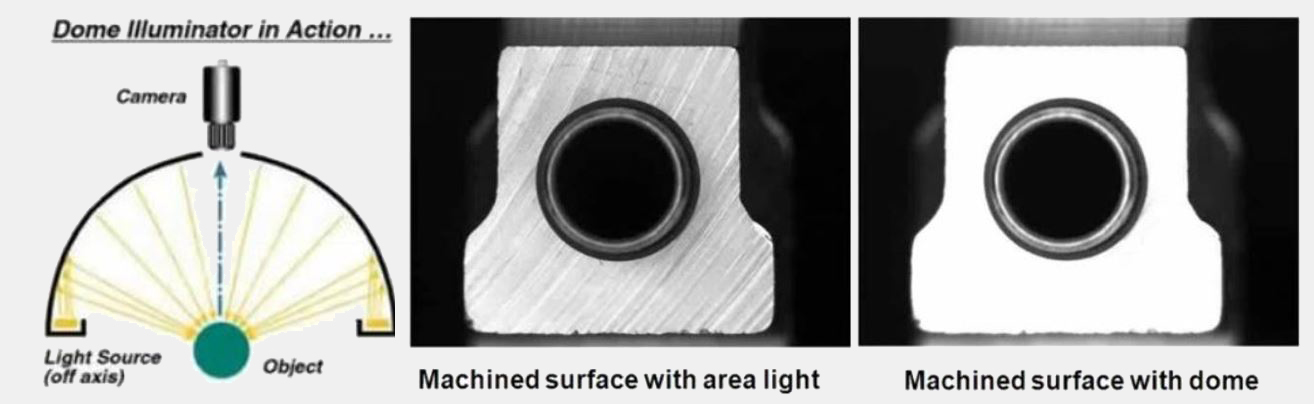
DOME, CDI, SCDI – Diffused, Uniform Light
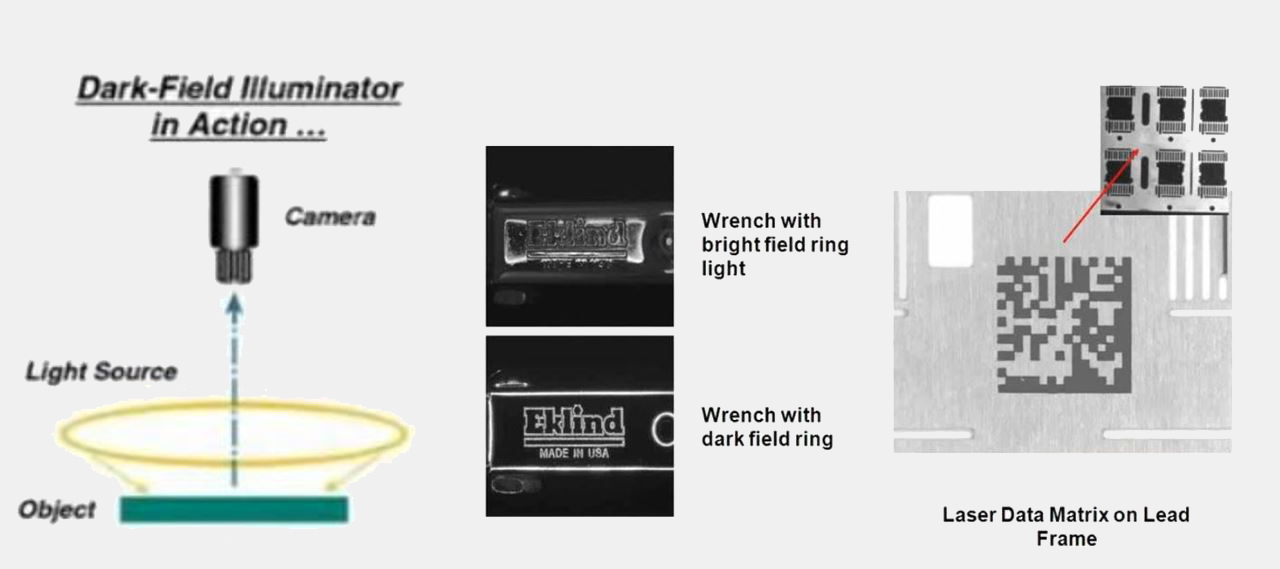
Dark-Field – Low-Angle Illumination “W”
- Ánh sáng màu và ánh sáng hồng ngoại
.JPG)
Backlight
- Kiểm tra đường viền
- Truyền ánh sáng so với ánh sáng bị chặn
- Định vị và đo kích thước bên ngoài
- Làm nổi bật cấu trúc bên trong của các đối tượng trong suốt
.JPG)
Ring Lights
- Chiếu sáng đều từ mọi phía làm giảm bóng
- Ánh sáng trung tâm trên hình ảnh
- Nhấn mạnh các tính năng bề mặt trên các bộ phận không phản chiếu
- Đèn vòng góc thấp nhấn mạnh các cạnh và vết xước trên bề mặt sáng bóng
- Chiếu sáng các bề mặt khuếch tán phẳng
.JPG)
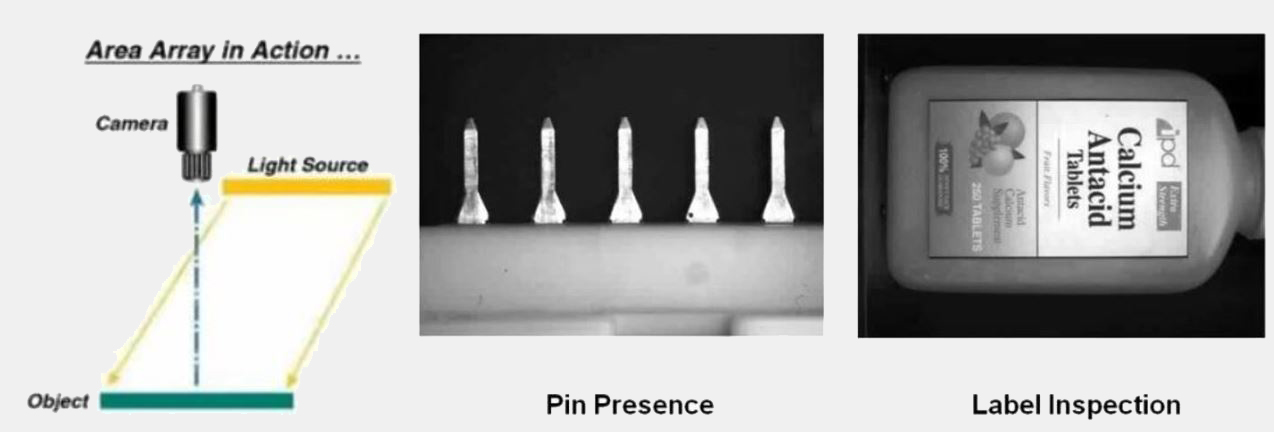
Area Array Lights
- Chiếu sáng một chiều mục đích chung
- Tốt cho các ứng dụng có bề mặt không phản chiếu
- Tiết kiệm
- Có thể được sử dụng trong nhiều loại cấu hình
Diffused On-Axis Lights
- Đồng đều, chiếu sáng khuếch tán cho các bề mặt phẳng, phản chiếu
- Tính đồng nhất cao hơn các nguồn thông thường
Dome
- Chiếu sáng khuếch tán cực kì đồng đều
- Giải pháp thiết thực cho các bề mặt sáng bóng, gập ghềnh
Dark- Field
- Chiếu sáng góc thấp để làm nổi bật các bất thường của một phần bề mặt
- Nhấn mạnh các tính năng “nâng cao”
Ánh sáng màu và ánh sáng hồng ngoại
Sử dụng đèn màu để tạo thêm độ tương phản
- Cùng một quang phổ ánh sáng sẽ làm cho một phần có vẻ sáng hơn ( tức là đèn LED màu đỏ sẽ tô sáng màu đỏ)
- Quang phổ ánh sáng đối lập sẽ làm cho một phần có vẻ tối hơn ( tức là đèn LED màu đỏ sẽ làm cho các vật thể màu xanh lá tối hơn)
Nguồn sáng hồng ngoại làm giả, sự khác biệt màu xám giữa các vật thể nhiều màu
- Lưu ý: Màu đen hấp thụ tia hồng ngoại
Như vậy, thị giác máy là chìa khóa công nghệ để cải thiện chất lượng sản phẩm và năng suất. Để xây dựng một hệ thống thị giác máy hiệu quả trong nhà máy cần:
- Xác định nhiệm vụ bạn muốn thị giác máy thực hiện
- Chọn sự kết hợp giữa độ phân giải máy ảnh, ống kính và ánh sáng
- Hiểu các tiêu chí hiệu suất và giới hạn của công nghệ bạn chọn
- Chọn một giải pháp đáp ứng nhu cầu hiện tại và lâu dài của bạn